|
BoB robotics
The Brains on Board robotics library
|
|
BoB robotics
The Brains on Board robotics library
|
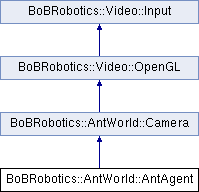
A simple agent with a position and a panoramic view of the current AntWorld. More...
#include <agent.h>
Public Member Functions | |
| AntAgent (sf::Window &window, Renderer &renderer, const cv::Size &renderSize, meters_per_second_t velocity=DefaultVelocity, radians_per_second_t turnSpeed=DefaultTurnSpeed) | |
| void | moveForward (float speed) |
| void | turnOnTheSpot (float clockwiseSpeed) |
| void | stopMoving () |
| void | addJoystick (HID::Joystick &joystick, float deadZone=0.25f) |
| void | drive (const HID::Joystick &joystick, float deadZone=0.25f) |
| Drive the robot using the current joystick state. | |
| radians_per_second_t | getMaximumTurnSpeed () const |
| void | setPosition (meter_t x, meter_t y, meter_t z) |
| void | setAttitude (degree_t yaw, degree_t pitch, degree_t roll) |
| void | updatePose (const units::time::second_t elapsedTime) |
 Public Member Functions inherited from BoBRobotics::AntWorld::Camera Public Member Functions inherited from BoBRobotics::AntWorld::Camera | |
| Camera (sf::Window &window, Renderer &renderer, const cv::Size &renderSize) | |
| void | display () |
| Pose3< meter_t, degree_t > | getPose () const |
| sf::Window & | getWindow () const |
| bool | isOpen () const |
| void | setPose (const Pose3< meter_t, degree_t > &pose) |
| void | setPosition (meter_t x, meter_t y, meter_t z) |
| void | setAttitude (degree_t yaw, degree_t pitch, degree_t roll) |
| virtual bool | readFrame (cv::Mat &outFrame) override |
| Try to read a frame in colour from this video source. More... | |
| Public Member Functions inherited from BoBRobotics::Video::OpenGL | |
| OpenGL (const cv::Size &size, const cv::Point &bottomLeft={ 0, 0 }) | |
| Create a Video::Input for reading from an OpenGL window. More... | |
| virtual std::string | getCameraName () const override |
| Get the name of this type of camera as a (short) string. More... | |
| virtual cv::Size | getOutputSize () const override |
| Get the current output resolution of this video stream. More... | |
| virtual bool | readFrame (cv::Mat &outFrame) override |
| Try to read a frame in colour from this video source. More... | |
| virtual bool | needsUnwrapping () const override |
| Whether this video source needs unwrapping with an ImgProc::OpenCVUnwrap360. More... | |
| Public Member Functions inherited from BoBRobotics::Video::Input | |
| ImgProc::OpenCVUnwrap360 | createUnwrapper (const cv::Size &unwrapRes) const |
| Create an ImgProc::OpenCVUnwrap360 object for this video stream. More... | |
| virtual std::string | getCameraName () const |
| Get the name of this type of camera as a (short) string. More... | |
| virtual units::frequency::hertz_t | getFrameRate () const |
| virtual cv::Size | getOutputSize () const =0 |
| Get the current output resolution of this video stream. More... | |
| virtual bool | needsUnwrapping () const |
| Whether this video source needs unwrapping with an ImgProc::OpenCVUnwrap360. More... | |
| virtual void | setOutputSize (const cv::Size &) |
| Set the output resolution of this video stream. More... | |
| virtual bool | readFrame (cv::Mat &outFrame)=0 |
| Try to read a frame in colour from this video source. More... | |
| virtual bool | readGreyscaleFrame (cv::Mat &outFrame) |
| Try to read a frame in greyscale from this video source. More... | |
| void | readFrameSync (cv::Mat &outFrame) |
| Read a frame synchronously, blocking until a new frame is received. | |
| void | readGreyscaleFrameSync (cv::Mat &outFrame) |
| void | write (cv::FileStorage &fs) const |
| Allows OpenCV to serialise info about this Input. | |
Static Public Attributes | |
| static constexpr meters_per_second_t | DefaultVelocity = 0.03_mps |
| static constexpr radians_per_second_t | DefaultTurnSpeed = 200_deg_per_s |
| Static Public Attributes inherited from BoBRobotics::Video::Input | |
| static constexpr const char * | DefaultCameraName = "unknown_camera" |
Additional Inherited Members | |
| Static Public Member Functions inherited from BoBRobotics::AntWorld::Camera | |
| static std::unique_ptr< sf::Window > | initialiseWindow (const cv::Size &size) |
| Protected Types inherited from BoBRobotics::AntWorld::Camera | |
| using | meter_t = units::length::meter_t |
| using | degree_t = units::angle::degree_t |